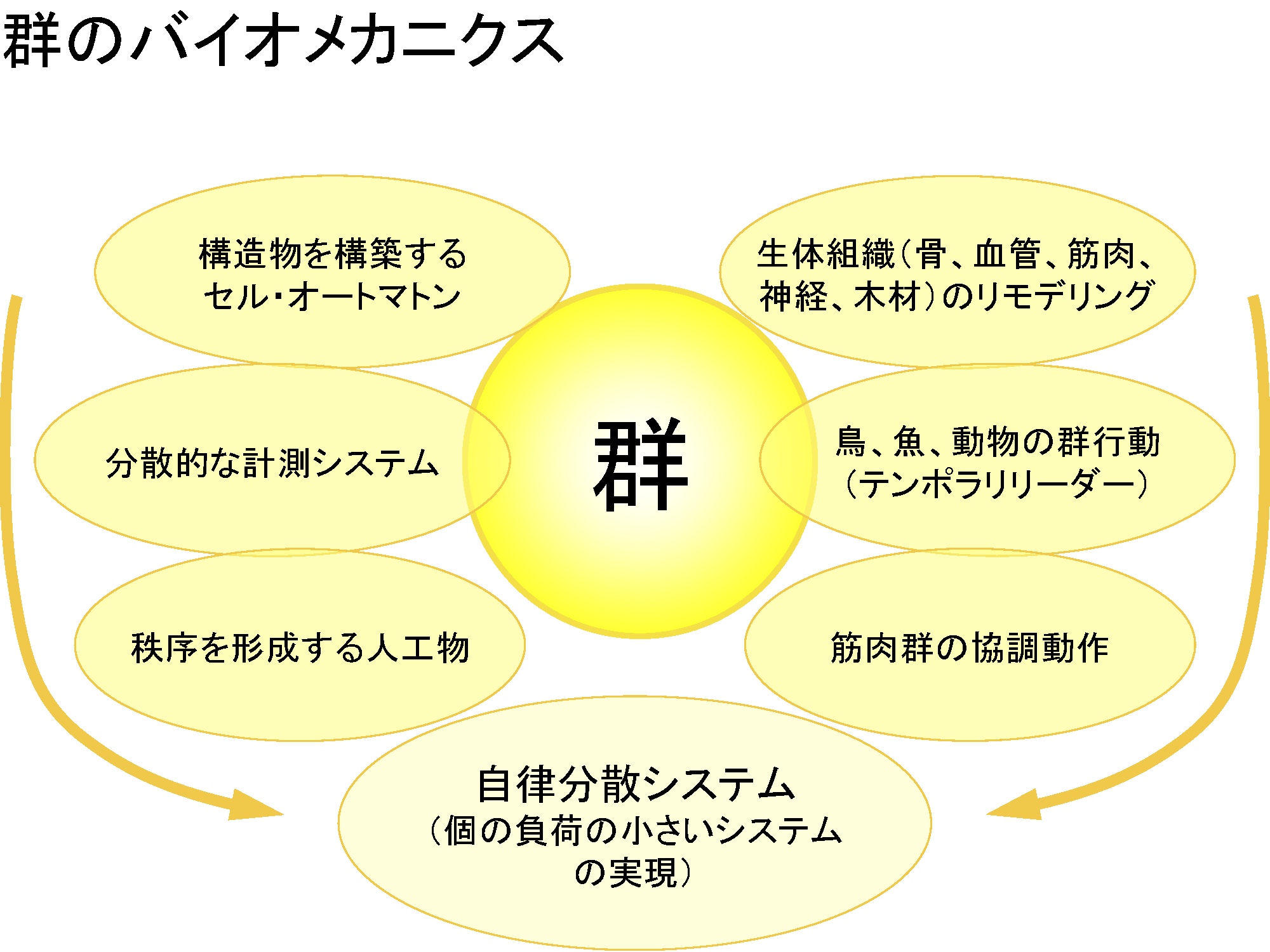
群のバイオメカニクス
※図内説明をクリックすると詳細へ
(一部見られない箇所があります)
類似の要素が多数集まると単体ではできない機能が生まれます。
たとえば細胞レベルでは骨のリモデリング、個体レベルでは人や車の移動が挙げられます。群の特徴の一つとして、隣同士の情報連絡で全体的な協調動作が生まれることが挙げられます。この意味では筋力群の活動も研究対象になると考えています。これらを「群のバイオメカニクス」として研究を展開しています。
- 構造物を構築するセル・オートマン
-
本研究で提案するセル・オートマトンモデルは、生体組織で見られるリモデリングの機能からヒントを得ています。このモデルは多数のセルが互いに機械的に結合しており、各セルは自身に生じた応力の大きさに応じてヤング率を変化させる働きがあります。コンピュータシミュレーションを行うと下の動画のように構造物が自動生成されていく過程を見ることができます。
Aspect ratio =1.0 Aspect ratio=3.0 Aspect ratio=3.0
左端を固定し右端中央に荷重を与えた状態でシミュレーション
構造生成は、初期形状の縦横比だけでなくヤング率分布も影響する。
【文献】
伊能教夫, 下平真子, 小林弘樹:
力学構造物を自己組織化するセル・オートマトン(ローカルルールによって生じるシステム全体の挙動),日本機械学会論文集(A編),Vol.61, No.586, pp.1416-1422(1995)
伊能教夫, 上杉武文:
力学構造物を自己組織化するセル・オートマトン(さまざまな位相構造の生成とその形態比較),日本機械学会論文集(A編), Vol.61, No.585, pp.1109-1114(1995)

- 分散的な計測システム
-
多数のセンサが分布的に配置されたセンサシステムは、建物や機械の挙動をモニタリングするのに有用です。このようなシステムを実現するにはセンサの高精度に検定することが必要です。
# 建造物のリアルタイム安全性診断システム
現行法では、地震などに対する建築物の安全性は設計段階で判断されていますが、 実際には地震動や経年変化によって建築物の強度は変化します。そこで本研究では建築物の中に多数の加速度センサを配置し, 各測定点での加速度、速度、変位の履歴から建築物の安全性をリアルタイムで診断するシステムの開発を目指しています。そのために加速度センサを高精度に検定可能な装置を開発しました。
【文献】
木村仁, 中村成志, 伊能教夫, 松平昌之, 吉田稔:
多軸加速度センサの主軸方向と感度の同定手法(主軸方向テンソルと感度テンソルの実測) 日本機械学会論文集C編,Vol. 78, No.786, pp.499-507, 2012
木村仁, 中村成志, 伊能教夫, 松平昌之, 吉田稔:
平行リンク機構を利用した加速度センサ検定装置(加速度データ積分による変位計算とセンサ個別補正) 日本機械学会論文集C編, Vol.78, No.785, pp.27-34, 2012
木村仁,中村成志,伊能教夫,吉田稔:
平行リンク機構を利用した加速度センサ検定装置 ―3 軸加速度センサの主軸方向と感度の同定手法― ロボティクス・メカトロニクス 講演会2011 講演論文集,(CD-ROM) 1P1-D10
- 秩序を形成する人工物
-
本研究で提案する構造物を構築する群ロボット(CHOBIE)は、同じ運動機能と情報処理機能を持つセル形のロボットで構成されています。ロボットは、隣接同士で情報通信しながら協調運動を行います。下の動画は、動物の群行動のように一時的にリーダーとして選出されたロボットが全体の運動を統制し、任務が終わると別のロボットがリーダーとなる仕組みを取り入れた前進運動です。 同じアルゴリズムでロボット台数によらず前進動作が実現できます。
CHOBIE(3robots) CHOBIE(5robots)
【文献】
鈴木陽介,伊能教夫,木村仁,小関道彦:
力学環境に適応変形する群ロボット (モジュール行動規範の数値的表現手法の提案), 日本ロボット学会誌, Vol.28, No.3, pp.293-301(2010)
鈴木陽介,伊能教夫,木村仁,小関道彦:
力学環境に適応変形する群ロボット(自律分散同期型制御による構造物の構築);
日本ロボット学会誌, Vol.26, No.1, pp.74-81 (2008)
伊能教夫,福島繁樹,下平真子,宇治橋貞幸:
力学構造物を適応的に構築する群ロボットの研究(セルロボットの力学特性が構造生成に与える影響) 日本機械学会論文集(C編),Vol.64, No.618, pp.617-622(1998)
伊能教夫,下平真子,福島繁樹 ,小川敬司,宇治橋貞幸:
力学構造物を適応的に構築する群ロボットの研究(移動荷重を対岸へ渡すために必要なセルロボットの情報処理機能)
日本機械学会論文集(C編),Vol.64, No.618, pp.623-628(1998)
- 生体組織のリモデリング
-
スナック菓子は,形が似ていても内部構造は多種多様です(図1).この構造が食感に影響を与えていることはもちろんですが,生地の材料特性も重要です.本研究では,スナック菓子のミクロレベルの材料特性を調べる方法(図2)を開発し,従来のマクロレベルのヤング率と比べて10~100倍高い値であることを初めて明らかにしました.
【文献】
Ren KADOWAKI, Norio INOU, Hitoshi KIMURA:
Measurement of Microscopic Young's Modulus of Crispy Foods,
International Proceedings of Chemical, Biological & Environmental Engineering,
Vol.50, pp79-83(2013)
- 鳥,魚,動物の群行動
-
スナック菓子は,形が似ていても内部構造は多種多様です(図1).この構造が食感に影響を与えていることはもちろんですが,生地の材料特性も重要です.本研究では,スナック菓子のミクロレベルの材料特性を調べる方法(図2)を開発し,従来のマクロレベルのヤング率と比べて10~100倍高い値であることを初めて明らかにしました.
【文献】
Ren KADOWAKI, Norio INOU, Hitoshi KIMURA:
Measurement of Microscopic Young's Modulus of Crispy Foods,
International Proceedings of Chemical, Biological & Environmental Engineering,
Vol.50, pp79-83(2013)
- 筋肉群の協調動作
- 私たちが足や腕を動かす際には多数の筋肉を動作する必要があります。筋肉が発揮する力は、身体運動を解析するために重要ですが一般に測定することは非常に困難です。ここでは筋肉群が協調的に動作する状態を最適化関数で求め、生体力学的解析に適用しています。
#人工肘関節のバイオメカニクス
人工肘関節は、リュウマチや関節障害によって腕が動かなくなった患者に適用されます。本研究では、「工藤式」と呼ばれる人工肘関節を装着した場合の骨組織に生じる応力状態を調べています。腕はさまざまな作業を行っており、応力解析には作業毎に筋肉群が発揮する筋力を推定する必要があり、現在この課題に取り組んでいます。
【文献】
小山内泰亮, 門脇廉, 木村仁, 伊能教夫, 池田純, 稲垣克記:
"人工肘関節のバイオメカニクス ~腕部の動的作用が与えるステム周辺の骨組織内応力分布への影響~"
第24回バイオフロンティア講演会講演論文集, 同志社大学室町キャンパス, 日本, 2013年11月1-2日, No.13-68, pp.105-106, (2013)
#フリークライミングのバイオメカニクス
インドアクライミングはバイオメカニクスの観点から興味深いものがあります。ここでは二次元の人体リンクモデルを考え、さまざまな姿勢で各関節に働くトルクを計算し、関節部に生じる筋力を最適化手法で推定してみました。計算結果は、負担がかかると感じるクライミングの姿勢と推定した筋力との間には相関性が認められました。
フリークライミングについてコメントしています(16:28-17:43)
(jstsciencechannel アスリート解体新書 (33)
スポーツクライミング ~省エネで壁を制す~)
【文献】
大滝義彦, 小関道彦, 木村仁, 伊能教夫:
フリークライミングのバイオメカニクス (クライミング姿勢の数理モデル化);
日本IFToMM会議シンポジウム前刷集(第12回), pp. 85-90, (2006)
◀ Back